Ups and downs to find its way back
During forward flight, honeybees' vertical oscillations can help the odometer (distance meter) of their path integrator estimate the distance travelled. thanks to a visual scaling, the odometer that integrates ventral optic flow is much more robust to variations in flight speed and height. Thsi study, published in the Journal of The Royal society Interface, also shows that the scaling is made possible by the optic flows of contraction and expansion generated by the honeybee's ups and downs in flight.
Winged insects of the Hymenoptera (bees, ...) and Lepidoptera (butterflies, ...) families are known to oscillate while flying forward at a frequency ranging between 1Hz and 5Hz. By oscillating vertically, insects enrich their ventral optic flow vector field by adding an expansion and contraction component to the optic flow of translation. The research scientists simulated the trajectory of a bee flying forward oscillating vertically in an open field and regulating its ventral optic flow in the presence of various condition of wind and terrain.
During the waggle dance in the hive, foraging bees communicate to their nest-mates the direction and the distance to a food source. It has been known since the 1990s that this distance is estimated by the foragers based on the optic flow perceived during their journey. Since then, it was assumed that this estimation of the distance travelled was achieved by mathematically integrating the ventral optic flow, i.e., the raw angular velocity of the ground image.
In this study, the researchers show that a raw mathematical integration of the optic flow is not at all reliable since it strongly depends on the wind direction as well as on the flight speed and height. Instead, simulations indicate that a visually scaled integration of the ventral optic flow is particularly robust to various wind conditions and this whatever the trajectory.
The scaling is based on the visual perception of the ground height: it is made possible by the optic flows of expansion and contraction generated by the bee's vertical self-oscillations performed during forward flight. The honeybee’s visual perception of the ground height is simulated by a mathematical estimator, called Extended Kalman filter. To estimate the ground height, the filter takes as inputs: i) the divergence of the ventral optic flow accounting for its expansion and contraction and ii) the wing strokes amplitude that controls mainly the vertical dynamics.
The visual odometer developed, called SOFIa, shows that these ups and downs in the flight trajectories can help bees (i) to return to a food source, (ii) to regain close vicinity of the hive, and (iii) to communicate to their nest-mates a reliable flight distance between the hive and the food source.
A particularly promising future application of the SOFIa model is the navigation of flying robots in GPS-denied environments. Indeed, this visual odometer can accurately estimate the distance flown based only on a minimalistic vision: a patent1 has been filed for this purpose in January 2021.
1Patent FR2100203 filed the 11th of January 2021, « DISPOSITIF D’ESTIMATION DE DISTANCE A UNE SURFACE ET DE LONGUEUR PARCOURUE », Inventors : F. Ruffier, L. Bergantin, T. Raharijaona
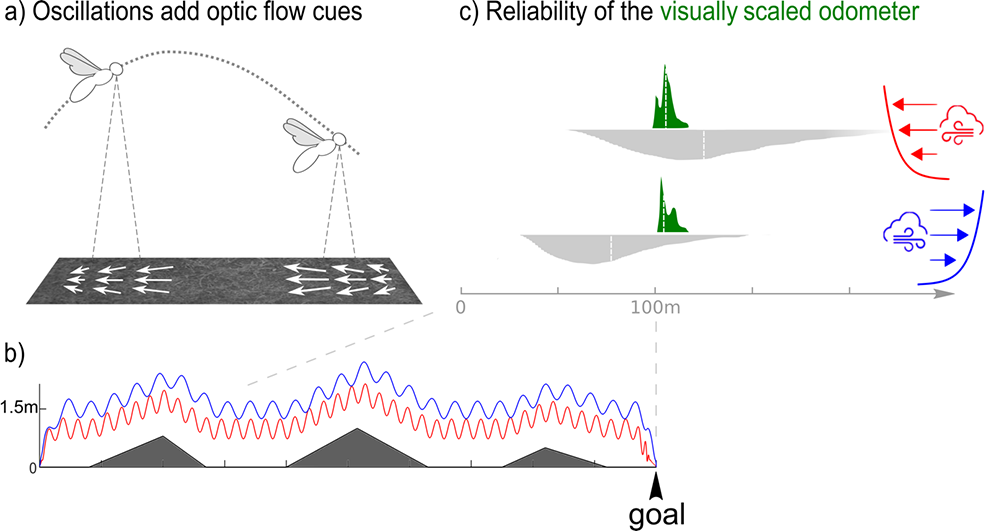
Figure: a) By oscillating vertically during forward flight, the insect enriches its ventral optic flow vector field by adding an expansion and contraction component to the optic flow of translation. b) Simulation of a bee flying forward oscillating vertically in an open field and regulating its ventral optic flow in the presence of various conditions of wind and terrain. c) The distribution of the SOFIa model outputs (in green), very tight and close to the goal, shows that the visually scaled integration of the ventral optic flow is much more reliable than the raw integration of the optic flow (cf. to the very broad distribution in grey): in particular, it no longer depends on the wind direction.
