

Quand des robots-boules se coordonnent par le regard
Résultats scientifiques
Bio ingénierie
Dans un article publié dans la revue Bioinspiration & Biomimetics, des scientifiques ont réussi à reproduire des mouvements collectifs avec des robots sphériques en s’inspirant de la perception visuelle des animaux. Ces robots s’orientent en fonction des silhouettes de leurs voisins qui peuvent apparaître plus grandes, plus petites ou se déplacer dans le champ visuel. Cette étude montre que les robots reproduisent fidèlement les mouvements collectifs observés chez les animaux.
S’inspirer des mouvements collectifs des animaux…
Imaginez une nuée d'oiseaux traversant le ciel ou un banc de poissons nageant en parfaite harmonie. Ces mouvements fascinants, étudiés depuis longtemps par les scientifiques, peuvent désormais être reproduits en simulation et avec des robots, en utilisant uniquement des informations visuelles.
Ces mouvements sont appelés mouvements collectifs. Traditionnellement, ces mouvements ont été modélisés sans tenir compte du système visuel biologique (ou de la vision naturelle) des individus. Ainsi, la plupart des modèles s'appuient sur la connaissance de la distance entre voisins, ce qui n'est pas le cas chez les animaux.
… pour créer un nouveau modèle…
Dans un article publié dans la revue Bioinspiration & Biomimetics, des scientifiques ont développé un nouveau modèle. Il ne repose pas sur des mesures artificielles de distance, mais utilise, comme le font les animaux, des indices visuels primaires pour appliquer un ensemble de quatre règles qui sont suivies indépendamment par tous les membres du groupe. Ce modèle suppose que chaque individu ne voit que les silhouettes formées par les autres, sans reconnaître les individus eux-mêmes. Ils sont représentés par leur silhouette dans le champ visuel de chaque individu, créant ainsi des indices visuels primaires lorsque les silhouettes bougent.
Les quatre règles sont les suivantes :
- L’attraction : cette règle représente le désir naturel du groupe de rester ensemble. Sans attraction, les individus s'éloigneraient les uns des autres. Elle est mise en œuvre en tenant compte de la taille optique de chaque silhouette.
- L'alignement : cette règle reflète la tendance du groupe à se déplacer dans la même direction. Sans alignement, les individus auraient du mal à suivre le groupe. Elle fonctionne en mesurant ce qu'on appelle le « flux optique », qui décrit le défilement visuel autour de l’individu.
- L’évitement : cette règle, introduite pour éviter les collisions entre robots, reflète la tendance individuelle à éviter les autres robots à proximité. Elle est mise en œuvre en modifiant l'attraction en fonction d'un seuil sur la taille optique de chaque silhouette.
- L’ancrage : cette règle a été ajoutée car l'espace disponible pour une expérience robotique est toujours limité. Elle reflète le confinement des groupes à un endroit donné. Cette règle fonctionne de manière similaire à la règle d'attraction, mais sur un emplacement clé virtuellement défini.
La mise en œuvre robotique introduit un délai entre la commande envoyée au robot et le début de son déplacement : ce délai a également été intégré à la simulation pour rester comparable.
… faisant progresser la robotique autonome.
Ces travaux utilisent un modèle visuel de mouvement collectif avec des robots sphériques où la vision de chaque robot est émulée. Ainsi, les robots reproduisent ces comportements collectifs avec un groupe de 10 robots sphériques indépendants. Ce modèle a aussi permis de combler l’écart entre la simulation et les expériences robotiques. En effet, l’expérimentation robotique apporte toujours des incertitudes difficiles à modéliser finement. Ici, les comportements collectifs simulés et robotiques sont presque identiques, même s’ils sont conduits par exactement le même modèle visuel.
En conclusion, ce modèle visuel minimal de mouvement collectif est suffisant pour recréer la plupart des comportements collectifs avec des robots sphériques, qui se comportent de façon analogue aux simulations numériques. Ce travail constitue une avancée pour la robotique autonome avec des applications potentielles dans la robotique en essaim, les missions de recherche et de sauvetage, et les systèmes de surveillance automatisés.
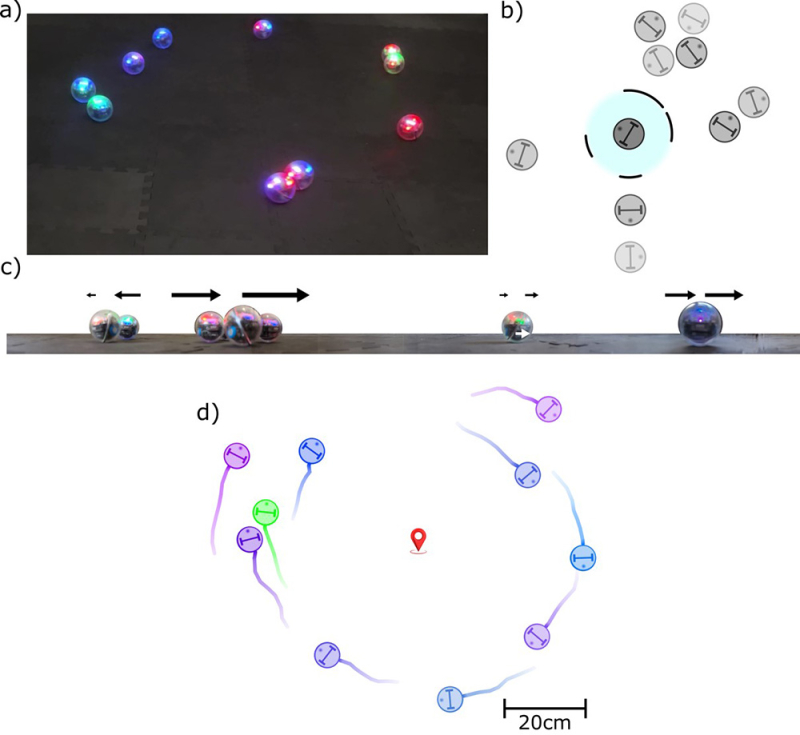
©Castro, Eloy, Ruffier (Creative Commons Attribution 4.0)
Figure : a) Le mouvement collectif tournoyant est reproduit par les robots sphériques.
b) La vision primaire des silhouettes voisines est émulée sur chaque robot.
c) Les silhouettes perçues peuvent grandir, diminuer, ou défiler dans le champ visuel.
d) L’ajout d’une ancre permet de contenir le mouvement collectif robotique dans un espace limité.
Référence : Visual collective behaviors on spherical robots. Castro D, Eloy C, Ruffier F.
Bioinspiration & Biomimetics, 31 janvier 2025, DOI : 10.1088/1748-3190/adaab9
Quand des robots boules se coordonnent par le regard
Résumé vidéo de l'article « Visual collective behaviors on spherical robots », in Bioinspiration and Biomimetics, D. Castro, C. Eloy et F. Ruffier. DOI: 10.1088/1748-3190/adaab9
Partager
Audiodescription
Contact
Laboratoire
Institut des Sciences du Mouvement - ISM (CNRS/Aix-Marseille Université)
Faculté des Sciences du Sport
163 Avenue de Luminy
13288 Marseille - France